


Uno dei principali problemi nello sviluppo di applicazioni della robotica sta nel fatto che addestrare i robot a compiere determinate operazioni non è semplice e le strade che si seguono di solito per farlo non sono efficaci come si vorrebbe.
È un problema di approccio, spiega ora il Computer Science and Artificial Intelligence Laboratory (CSAIL) del MIT, perché nel cercare di far imparare i robot non abbiamo tenuto ben presente come noi stessi impariamo.La risposta è C-Learn, un nuovo metodo di apprendimento sviluppato ad hoc.
L’addestramento in robotica avviene normalmente in due modi: per dimostrazione o per pianificazione. Nel primo metodo i robot osservano il compito che devono eseguire e lo replicano, con il limite che ciò che si impara in questo modo non può essere adattato con la stessa accuratezza a situazioni diverse.
L’addestramento per pianificazione richiede invece una pianificazione precisa dei movimenti che il robot dovrà compiere, in funzione dell’obiettivo da raggiungere e delle condizioni al contorno.
Questo addestramento è adattabile, ma va modificato da programmatori esperti.
 Il metodo sviluppato dal CSAIL parte dal presupposto che l’apprendimento umano non parte da zero ma da una conoscenza di base dell’ambiente e degli elementi in cui e con cui interagiamo. Nella robotica non dovrebbe essere diverso. Così nel metodo C-Learn ai robot viene come prima cosa impartita una conoscenza di base fatta di informazioni su come interagire con determinati oggetti in base alle loro proprie caratteristiche.
Il metodo sviluppato dal CSAIL parte dal presupposto che l’apprendimento umano non parte da zero ma da una conoscenza di base dell’ambiente e degli elementi in cui e con cui interagiamo. Nella robotica non dovrebbe essere diverso. Così nel metodo C-Learn ai robot viene come prima cosa impartita una conoscenza di base fatta di informazioni su come interagire con determinati oggetti in base alle loro proprie caratteristiche.
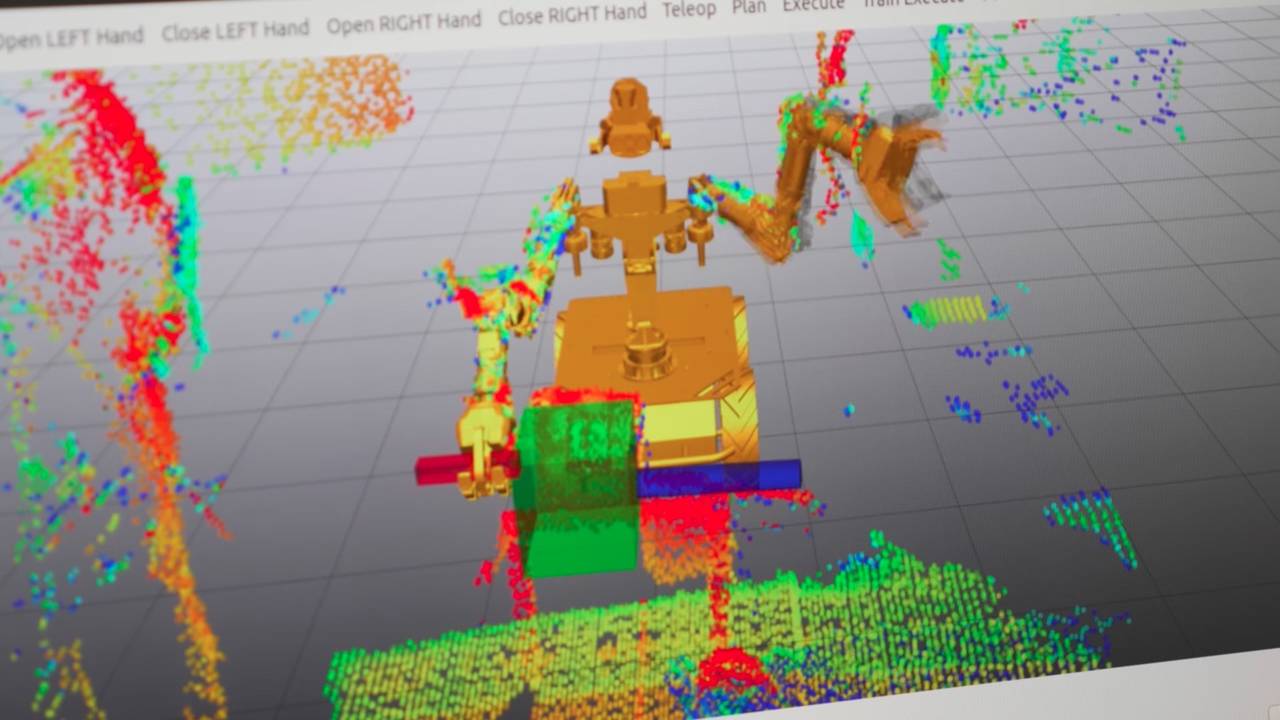
Una interfaccia grafica 3D viene poi usata da un “addestratore” per mostrare al robot come compiere l’operazione desiderata. Per questo l’operazione viene suddivisa in una sequenza dei suoi momenti più significativi. Confrontando questi momenti con la base di conoscenza iniziale, il robot può adattare il suo comportamento anche a condizioni (non troppo) diverse da quelle ideali.
C-Learn ha dimostrato di essere un sistema efficace. Secondo il CSAIL la percentuale di successo dei robot addestrati in questo modo è del 87,5 percento se agiscono da soli e del 100 percento se collaborano con un operatore umano che corregge le imprecisioni derivanti da valutazioni errate della sensoristica di bordo.
 Cosa anche più interessante per le possibili applicazioni in robotica, usando C-Learn l’addestramento impartito a un robot può essere facilmente trasferito a un altro. L’addestramento resta efficace anche se i due robot non sono identici e hanno movimenti diversi, proprio perché C-Learn non si basa su una descrizione precisa e rigida delle operazioni da svolgere.
Cosa anche più interessante per le possibili applicazioni in robotica, usando C-Learn l’addestramento impartito a un robot può essere facilmente trasferito a un altro. L’addestramento resta efficace anche se i due robot non sono identici e hanno movimenti diversi, proprio perché C-Learn non si basa su una descrizione precisa e rigida delle operazioni da svolgere.
Il CSAIL ha testato la “genericità” di C-Learn prima addestrando Optimus – un piccolo robot progettato per la disattivazioni di ordigni esplosivi – per operazioni come spostare un oggetto o aprire una porta, poi trasferendo la sua “competenza” a un robot completamente diverso. Si trattava di Atlas, un robot umanoide alto due metri che ha dimostrato, in alcune simulazioni, di aver appreso le operazioni per cui Optimus era stato addestrato.









{kind=link}