


Di recente, un team guidato da ricercatori del Computer Science and Artificial Intelligence Laboratory (CSAIL) del MIT ha esplorato la possibilità di programmare le auto a guida autonoma in modo da classificare le personalità sociali di altri automobilisti, per poter prevedere meglio cosa faranno le diverse auto e, di conseguenza, essere in grado di guidare in modo più sicuro tra gli altri veicoli.
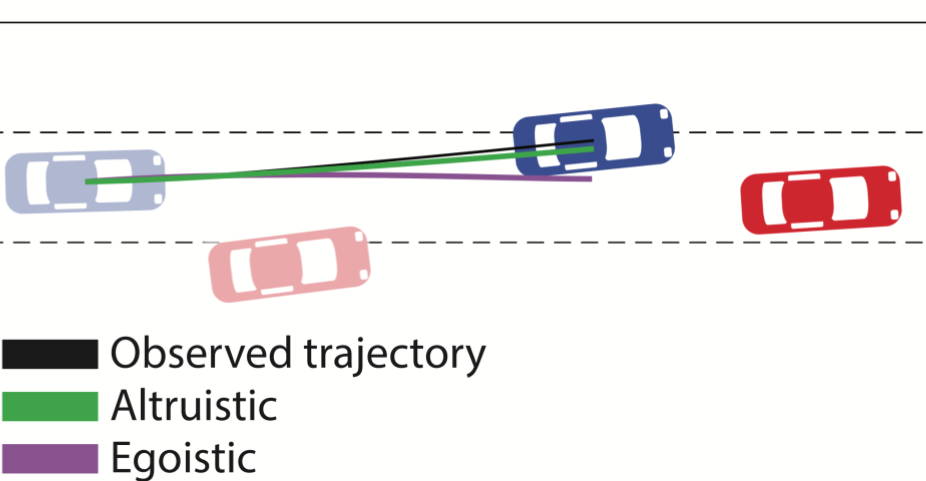
In un paper, gli scienziati hanno integrato strumenti della psicologia sociale per classificare il comportamento di guida relativamente a quanto fosse egoista o altruista un determinato guidatore.
In particolare, ha spiegato il MIT, i ricercatori hanno usato il cosiddetto orientamento del valore sociale (social value orientation, SVO), che rappresenta il grado in cui qualcuno risulta egoista o altruista e cooperativo. Il sistema quindi stima gli SVO degli automobilisti al fine di creare traiettorie di guida in tempo reale per le auto a guida autonoma.
Mediante test dell’algoritmo su alcune situazioni, il team ha mostrato di poter prevedere meglio il comportamento di altre auto di un fattore del 25 percento.
Sebbene non sia ancora abbastanza robusto per essere implementato su strade reali, sottolinea il MIT, questo sistema potrebbe avere, in prospettiva, interessanti casi d’uso potenziali, e non solo per le auto a guida autonoma. Ad esempio, in una implementazione di guida assistita a un autista umano, il sistema potrebbe avvisare se individua, in prossimità dell’auto sui cui è installato, la presenza di un’altra auto che mostra il comportamento di un guidatore aggressivo, per consentire di regolarsi di conseguenza. Potrebbe anche, sottolinea ancora il MIT, permettere alle auto a guida autonoma di imparare effettivamente a esibire comportamenti più umani che potrebbero essere più facili da comprendere per i guidatori umani.
Secondo i ricercatori del MIT, infatti, creare un comportamento più umano nei veicoli autonomi è fondamentale per la sicurezza dei passeggeri e dei veicoli circostanti.
Per cercare di espandere la “consapevolezza sociale” dell’auto, il team del CSAIL ha combinato i metodi della psicologia sociale con la teoria dei giochi in un framework teorico per concepire situazioni sociali tra giocatori concorrenti. Il team ha quindi modellato scenari stradali in cui ciascun guidatore ha cercato di massimizzare la propria utilità e ha analizzato le loro “migliori risposte” date le decisioni di tutti gli altri agenti.
Per la fase successiva della ricerca, il team prevede di lavorare sull’applicazione del modello a pedoni, biciclette e altri agenti degli ambienti di guida. Inoltre, studierà altri sistemi robotici che agiscono tra gli umani, come i robot domestici, e integreranno l’SVO nei loro algoritmi di predizione e decisione.









{kind=link}